
Introduction:
On June 4, 2019, the latest industrial robotics standard GB/T 37414.1-2019 was released, and is scheduled to be formally implemented on January 1, 2020. In view of the fact that the general EMC test system procurement and installation cycle is more than 4 months, it is necessary to make the equipment procurement plan to meet the test requirements of the new standard in advance.
Ltd. is based in Shenzhen, an EMC EMC test equipment and system providers, the company engaged in EMC technicians with rich qualifications, work experience of up to 10 years or more, built civil, automotive, military, aerospace and other test systems. Now the industrial robot standard update, EUTTEST special for customers to organize the standard analysis, for the majority of customers to carry out new test projects to help.
This article only organizes all the test items, detailed test methods for each item we will provide GB/T 37414.1-2019 test system after home training.
I. GB/T 37414.1-2019 Standard Release and Implementation Date
- China Standard Classification Number (CCS)
- J09
- International Standard Classification Number (ICS)
- 21.010
- Release Date
- 2019-06-04
- Implementation date
- 2020-01-01
- competent authorities
- China Machinery Industry Federation (CMIF)
- focal point
- National Technical Committee for Standardization of Electrical Systems in Industrial Machinery
- Published by
- State Administration for Market Supervision and Administration, China National Standardization Administration
Second, GB/T 37414.1-2019 Summary of required EMC test items
According to the content of the GB/T37414.1-2019 standard, it is known that the EMC requirements for industrial robots are in Part 8:
The following is in abbreviated form for ease of writing:
For example, GB/T 29482.1 - 2013 7.9: represents section 7.9 in the 2013 version of the standard GB/T 29482.1.
8.1: Launch-test items
- radiation interferenceRE: GB/T 29482.1 - 2013 7.9
- conductive interferenceCE: GB/T 29482.1 - 2013 7.9
8.2, Immunity - test items
- electrostatic protectionESD: GB/T 29482.1 - 2013 7.10.1
- Impulse group immunity: EFT: GB/T 29482.1 - 2013 7.10.2
- Surge immunity: Surge: GB/T 29482.1 - 2013 7.10.3
- Voltage dips and short-time interruption immunity: Dips: GB/T 29482.1 - 2013 7.10.4
- Radiofrequency electromagnetic field radiation immunity: RS: GB/T 29482.1 - 2013 7.10.5
- Conducted immunity of RF field induction: CS: GB/T 29482.1 - 2013 in 7.10.6
- Power frequency magnetic field immunityGB/T 29482.1 - 2013 Medium 7.10.7
- Judgment requirements for immunity performance: GB/T 29482.1 - 2013 7.10.8
III.GB/T 37414.1-2019 Test requirements for all test items:
3.1、RE、CE test limit requirements
In 10m test position according to GB/T6113.201, 203 test

RE, CE test limit requirements
3.2. ESD Static Immunity Test Requirements
Test conditions.
Contact discharge ±6 kV , Air discharge ±8 kV.
Relative humidity of test chamber: 30%~60% .
Performance criteria: Grade B.
Meet the GB/T37414.1 standard of electrostatic discharge gun selection
Meet the following EFTSURGEDIPS product selections
3.3. Pulse group immunity test requirements
power port (of a computer)The pulse group with a repetition frequency of 5 kHz at 2 kV was used for 1 min;
I/O signal, data, control and measurement port (or interface) cablesThe pulse group is a 1 kV pulse with a repetition frequency of 5 kHz and a duration of 1 min:
-Power ports/interfaces (AC/DC power cord, protective ground wire, motor power cord): 2 kV/5 kHz.
-Control and measurement signal interface (level, pulse, analog, etc.): 1 kV/5 kHz.
-Signal port/interface (RS232/RS485, USB, keyboard cable, fieldbus, etc.): 1 kV/5 kHz.
Performance criteria: Grade B.
3.4. Surge immunity test requirements
-Power ports (AC power cord, protective grounding wire): 1 kV (line-line coupling), 2 kV (line-ground coupling).
Interface for control and measurement signals (level, pulse, analog, etc.): 1 kV (line-to-ground coupling).
Performance criteria: Grade B.
3.5. Voltage drop and short-time interruption immunity test requirements
According to GB/T22841, the voltage amplitude drops to 70% of the rated value at any time in the AC input power supply (port).
(Test level U T is 70% , actual voltage drop is 30% of rated value), duration 500 ms; voltage amplitude drop is 40% of rated value.
(The test level U T is 40%, but the actual drop is 60% of the rated voltage value.) The duration is 200 ms, the successive interval is 10 s, and one of the two test levels is selected.
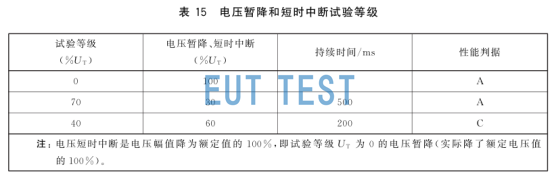
GBT 37414.1-2019 Requirements for testing immunity to voltage dips and short-term interruptions
3.6. RF EMF radiation immunity test requirements
Frequency range 80 MHz~1 000 MHz , Field strength 10 V/m , Signal amplitude modulation 80% Amplitude modulation AM ( 1 kHz )
Performance judgement: Grade A
Test System Selection for 10V/m Radiated Immunity Requirements
3.7. Conducted immunity test requirements for RF field induction
Frequency Range 0.15 MHz~80 MHz , RF Voltage 10 V , Signal Amplitude Modulation 80% Amplitude Modulation AM (1 kHz)
Performance judgement: Grade A
Conducted Immunity Current Probe FCC F-120-9 to IEC 61000-4-6
3.8. Requirements for testing immunity to magnetic fields at industrial frequencies
Frequency 50Hz, magnetic field strength 30 A/m.
Performance criteria: Class A
3.9. Test Requirements for Determination of Immunity Performance Requirements
Industrial robots in the immunity test, need to be tested according to the following test items are tested and according to 2-4 columns of the performance judgment based on the method of determining the working state of the product and written in the test report.
<<<<提醒:左右滑动表格>>>>| sports event | Performance Judgment Basis | ||
| A | B | C | |
| General Product Performance | No significant change in operating characteristics. Within specified tolerances Normal operation | The operating characteristics are obvious (visible). or audible) changes. Self-recovering | Shutdown, change in operating characteristics. Protection Device Trigger. Cannot recover on its own |
| Special torque characteristics of the drive | Torque deviation within specified tolerances | Dynamic torque deviation exceeding the specified tolerance. It's self-recovering. | Torque runaway. Cannot recover on its own |
| Subcomponent performance: Information processing and detection functions | Communication and exchange of data with external devices without harassment | Temporarily harassed communications, will not be sent. The following may be caused by an external or internal device Setting the shutdown error report | Communication error, data or message Lost; Cannot recover on its own; and No loss of saved programs; and No loss of the user's program; and No loss of system or device settings |
| Display and control panel operation | No change in on-screen information, only It's a slight fluctuation in brightness or a slight change in character. | Information may change temporarily, screen Unsatisfactory curtain brightness | Shutdown, lost or abnormal information The way it works, the information displayed is clearly incorrect. No loss of saved programs; and No loss of the user's program. No loss of system or device settings |
| Acceptable Performance Criteria A, B, C: False start is an unanticipated change of the product from the logical state "STOP". If the motor is not running at all, it may cause the motor to run. | |||